
Random bin picking is typically at the input stage of a manufacturing process. Instead of traditional static fixtures or pre-filled stacking patterns, a robot is instead emptying a bin bulk-filled with parts for placing on, for example, a feeder, conveyor, or sorter for further processing in the plant. The choice of the vision system and, in particular, the 3D camera impacts the robot’s ability to successfully detect, pick, and place all types of parts.


Bin picking is still a challenge for robots. Even at large manufacturers, adoption of bin picking stations is low, and at SMEs the number is still close to zero. Unpickable objects are typically complex-shaped, hard to manipulate, entangled, and/or highly reflective machined or polished metals. The difficulty stems from the inherent uncertainty in physics, perception, and control.
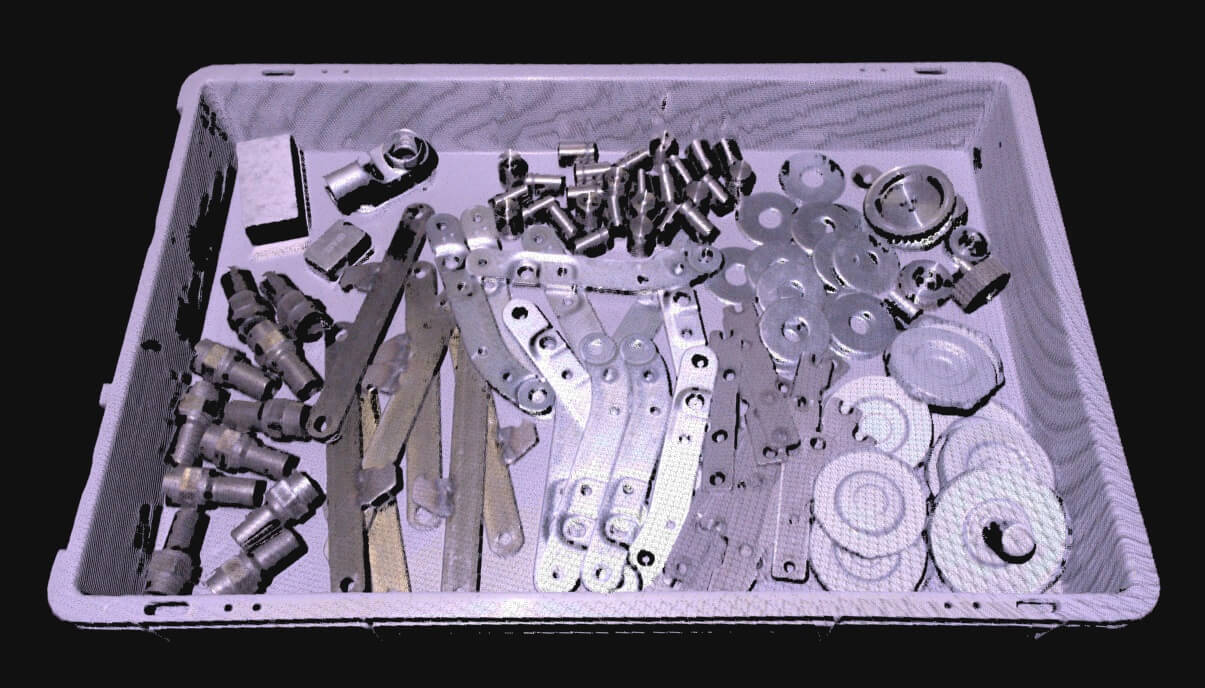
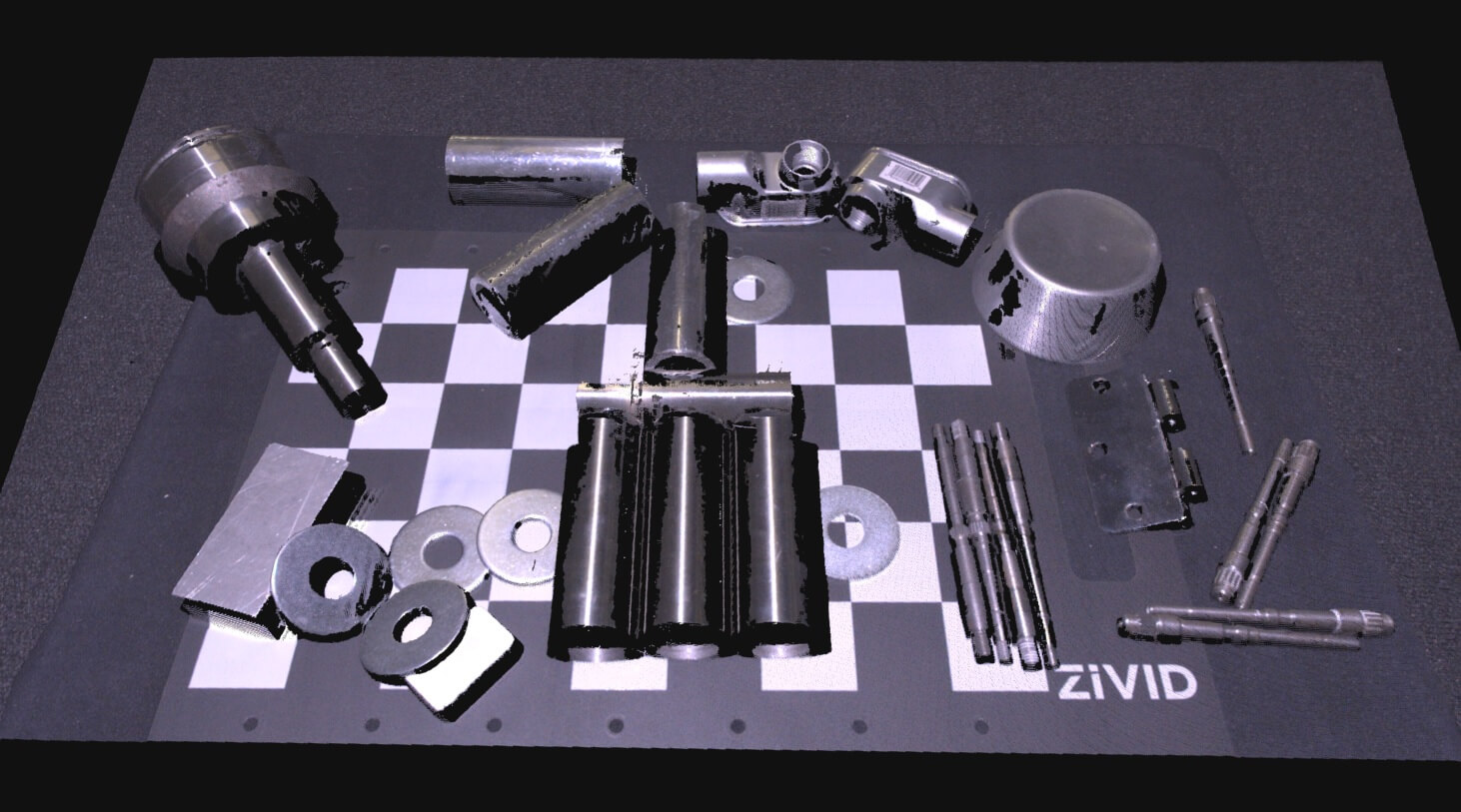
See shiny, reflective, machined, and polished parts
3D HDR and Artifact Reduction Technology (ART) ensures excellent suppression of imaging artifacts from reflections, interreflections, specular highlights, and high contrast transitions.
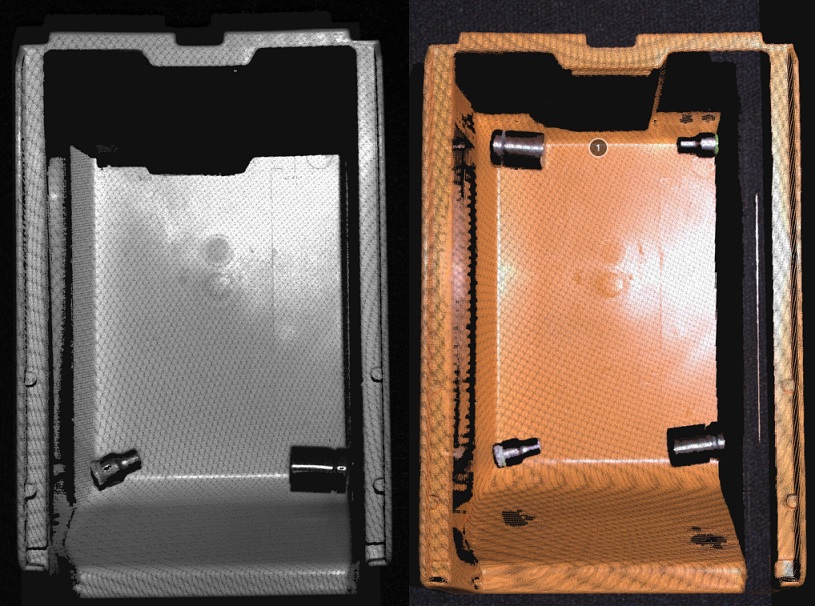
Experience fewer occlusion outliers
Zivid Two is ultra-compact with a small baseline and more optimal occlusion performance than larger baseline cameras and scanners. A large baseline gives excessive projector/camera shadowing and loss of scene details, creating holes, and missing data affecting the detection. There's also a risk of missing smaller objects hidden by shadows in the bin, for example, close to corners and edges, especially when picking from smaller boxes.

The price is only half to one-third of the same type of typical products.
Built-in AI algorithms enable robots quickly and accurately recognize objects of random sizes and shapes (including cartons, boxes, bags, etc.) without registration.
The built-in path planning algorithm guarantees the movement of robots is precise and collision-free.

A visualized interface can simulate the robots' movement with only one click.
Seamless integration with the WMS system allows robots to pick up goods on demand.
| Speed | Single cycle time can reach 3s |
| Objects | Support objects in different sizes and shapes (including randomly stacked tiny objects, complex-structured metal parts with dark or shiny surfaces, etc.) |
| Robot Brands | Can be adapted to various mainstream robot brands, such as ABB, KUKA, YASKAWA, Kawasaki, Rokae, Peitian, Techman, Estun, etc. |
| Calibration | Self-calibration |
| Service | Personalized solution; Staff training; Fixture design. |
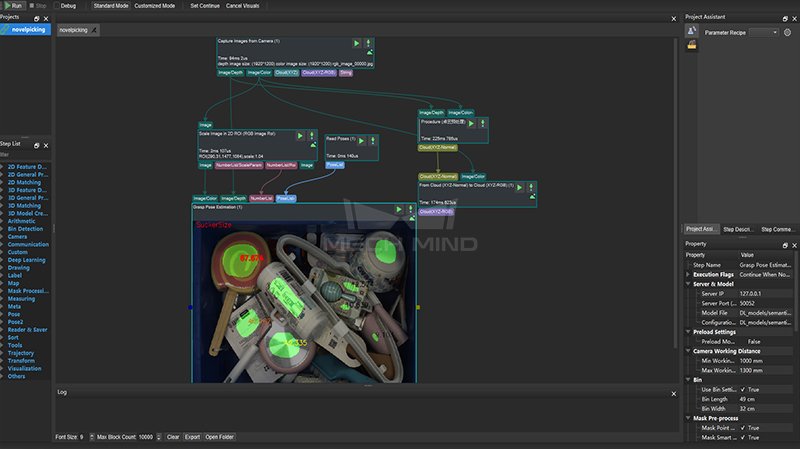
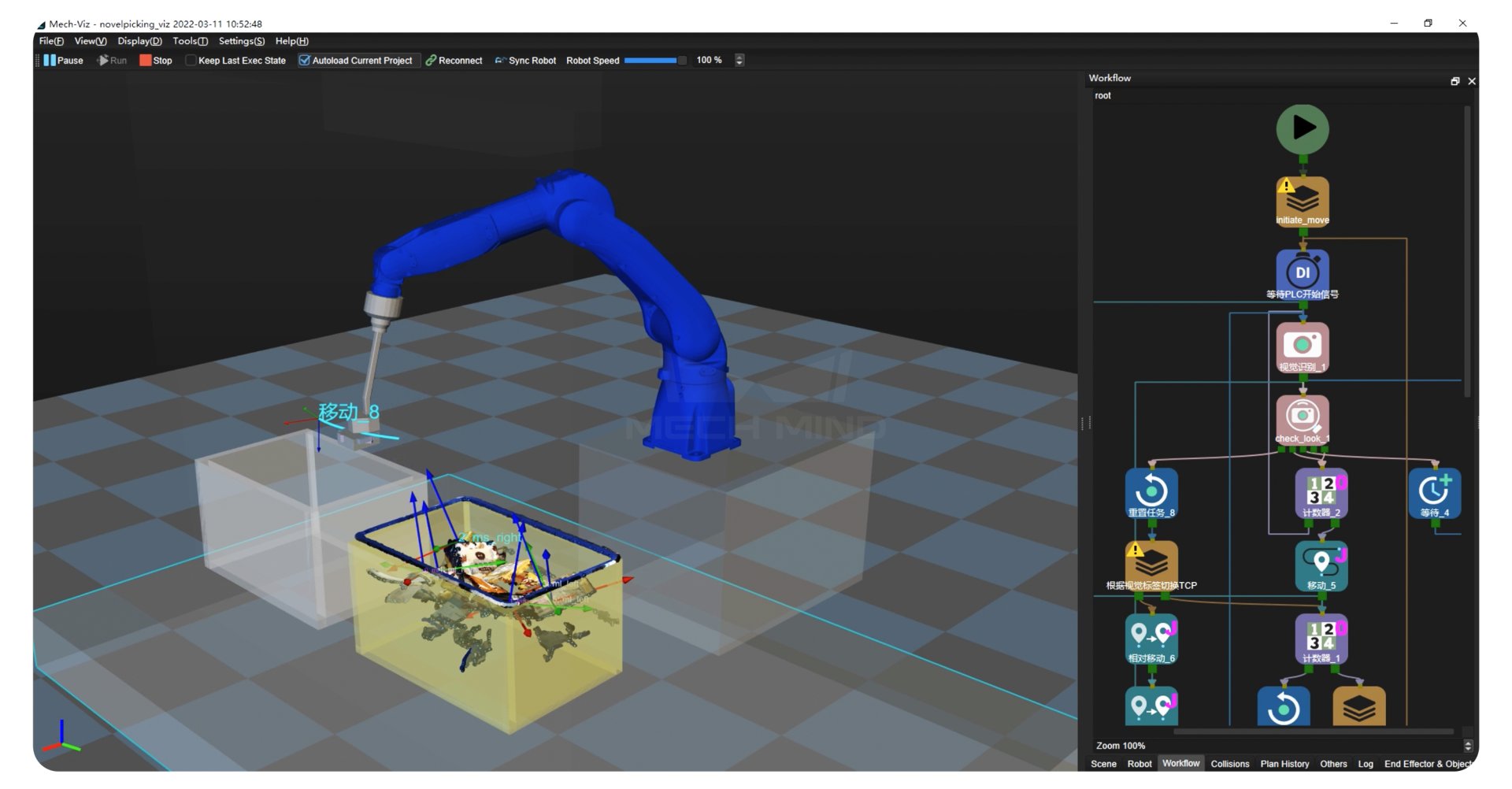
One-click simulation on the left side of the software. Users can intuitively see the robot's motion path, recognition results and collision model.
The right side is the robot operation process, which is easy to learn to operate.
Different from traditional code-based programming software, Mech-Viz is a graphical and visualized programming environment.
Built-in path planning, collision detection, and grasping strategy, and other intelligent algorithms help the robot plan the optimal route and avoid collision.
With Mech-Viz, users can manipulate robots after simple training.
Our solutions can be adapted to various mainstream robot brands.








