Machine tending
Machine tending is the process of loading and unloading parts into machines using industrial or collaborative robots. The choice of the vision system and, in particular, the 3D camera impacts the robot’s ability to successfully detect the target objects, pick them accurately and place them correctly at the desired processing location.

The price is only half to one-third of the same type of typical products.
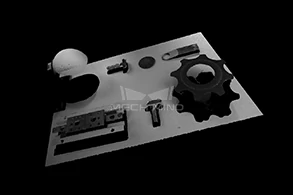
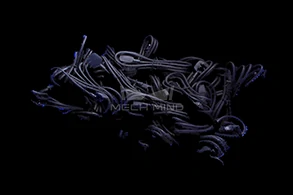
Recognize densely stacked shiny, polished, reflective parts with ease.
The built-in path planning algorithm guarantees the movement of robots is precise and collision-free.

A visualized interface can simulate the robots' movement with only one click.
The code-free programming enables a low threshold for operators to deploy.
| Speed | Single cycle time can reach 3s |
| Objects | Support objects in different sizes and shapes (including randomly stacked tiny objects, complex-structured metal parts with dark or shiny surfaces, etc.) |
| Robot Brands | Can be adapted to various mainstream robot brands, such as ABB, KUKA, YASKAWA, Kawasaki, Rokae, Peitian, Techman, Estun, etc. |
| Calibration | Self-calibration |
| Service | Personalized solution; Staff training; Fixture design. |
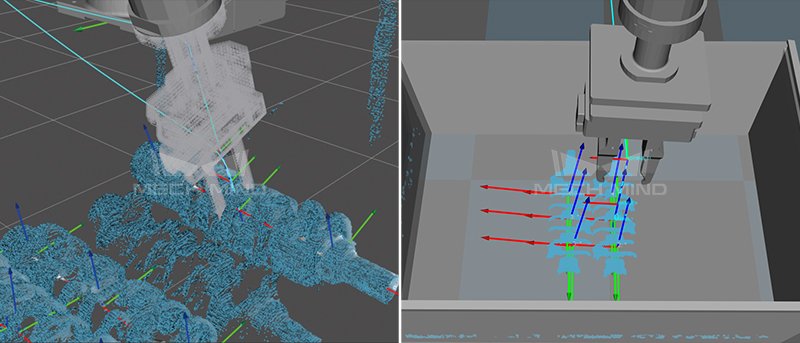
The intelligent grasping strategy guides the robot to accurately pick up objects. The picking success rate is > 99%.
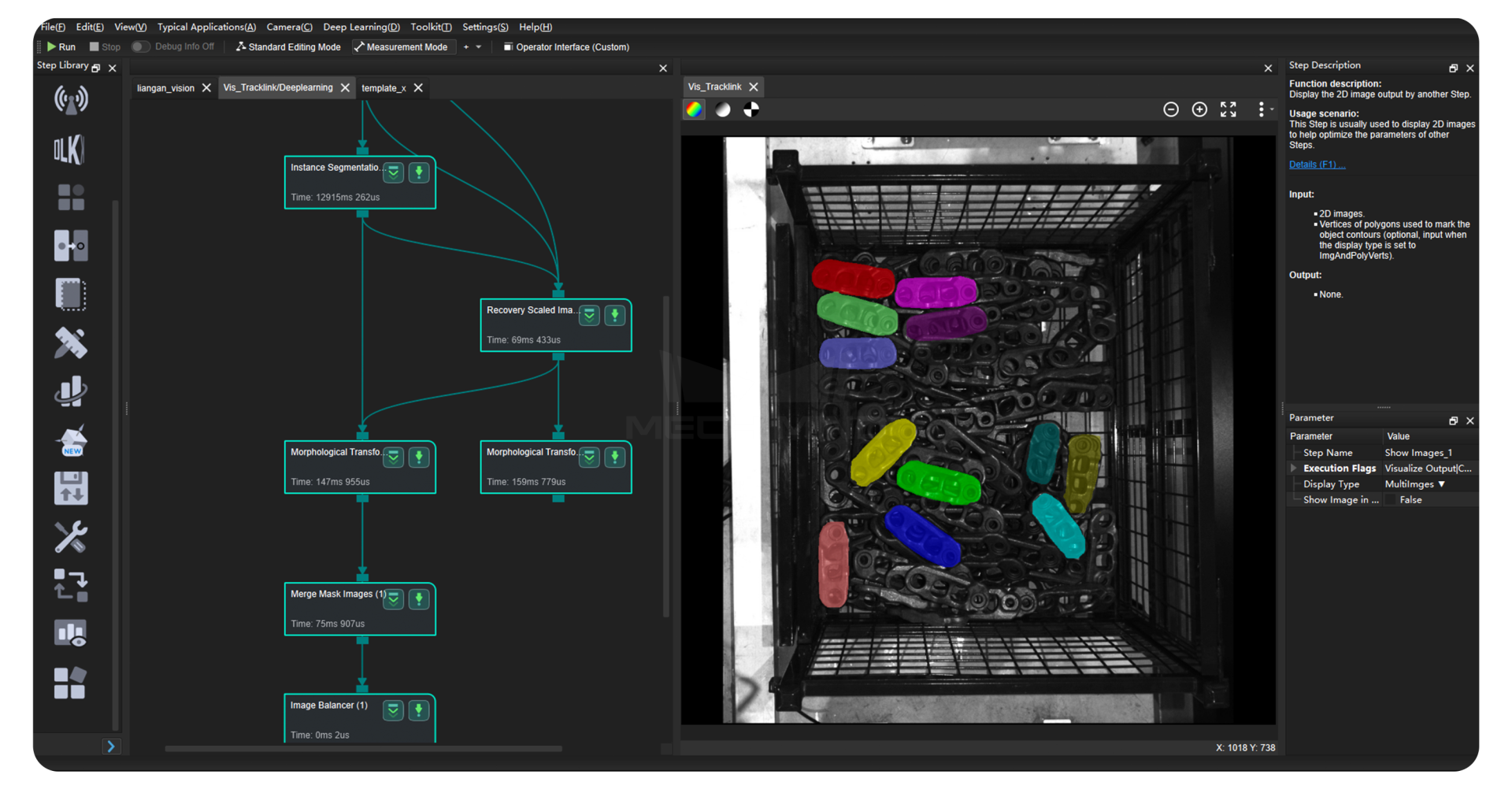
Mech-Vision simplifies all codes into steps, and users can edit algorithms without writing any codes.
It can support users to develop customized algorithms and independently deploy multiple typical applications.
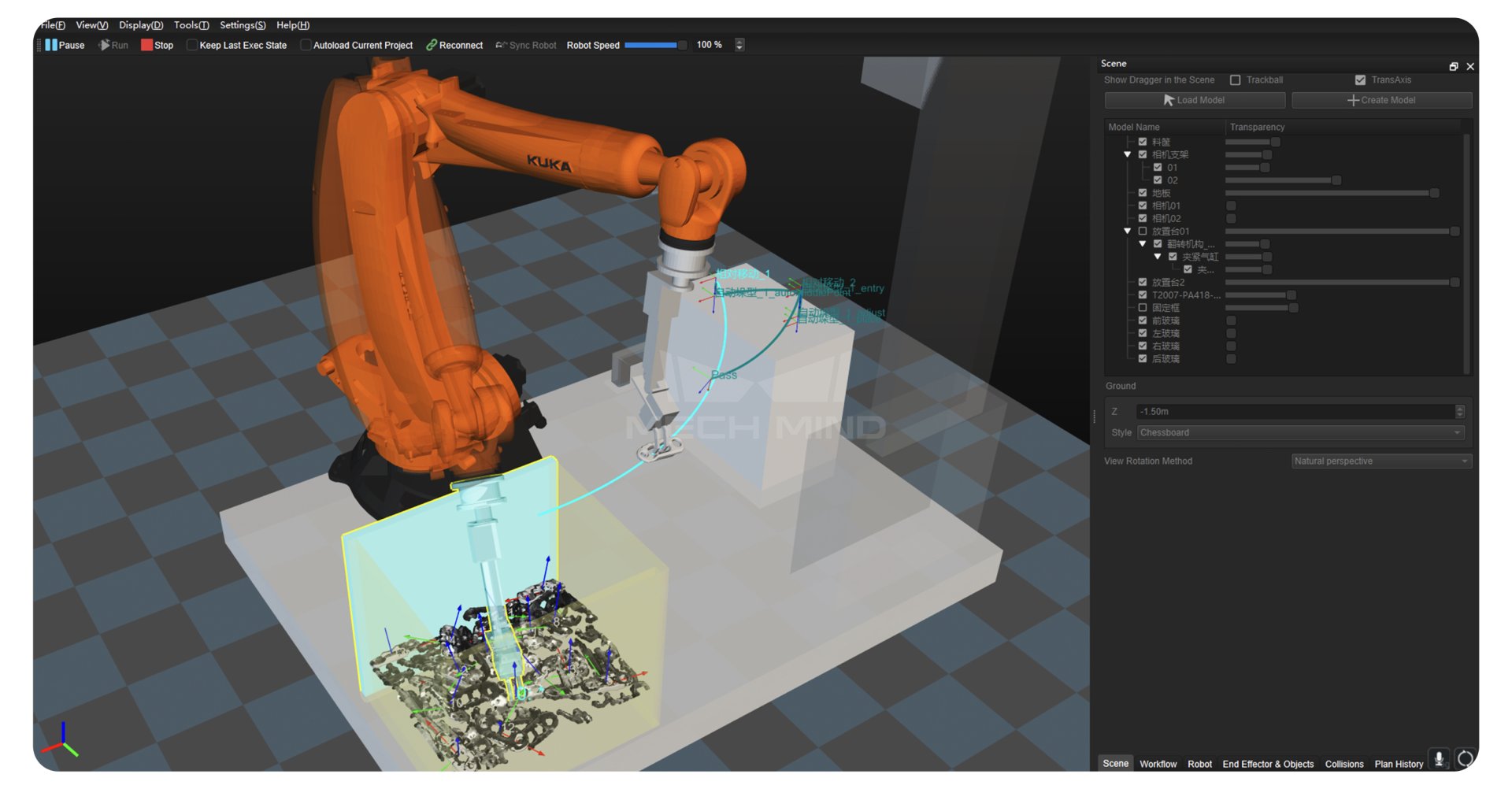
Mech-Viz Interface
One-click simulation on the left side of the software. Users can intuitively see the robot's motion path, recognition results and collision model.
The right side is the robot operation process, which is easy to learn to operate.
Different from traditional code-based programming software, Mech-Viz is a graphical and visual programming environment.
Built-in intelligent algorithms such as path planning, collision monitoring, and picking planning can help the robot plan the optimal route and avoid collision.
With Mech-Viz, users can manipulate robots after simple training.
Our solutions can be adapted to various mainstream robot brands.